Der kleine Schrittmotor 28BYJ-48 mit Treiberplatine ULN2003 ist es besonders, da die Spanungsversorgung des Arduino ausreicht ihn zu Betreiben. Ich möchte auf dieser Seite folgende 6 Punkte mit dir zusammen abarbeiten.
1 Stepper, referenzfahrt
2 Stepper, relative Position
3 Stepper, absolute Position
4 Stepper, Position speichern
5 Stepper, Position anzeigen
6 Stepper, Position über Inkrementalgeber einstellen
Elektrische Anschluss zwischen Arduino und dem Schrittmotor 28BYJ-48
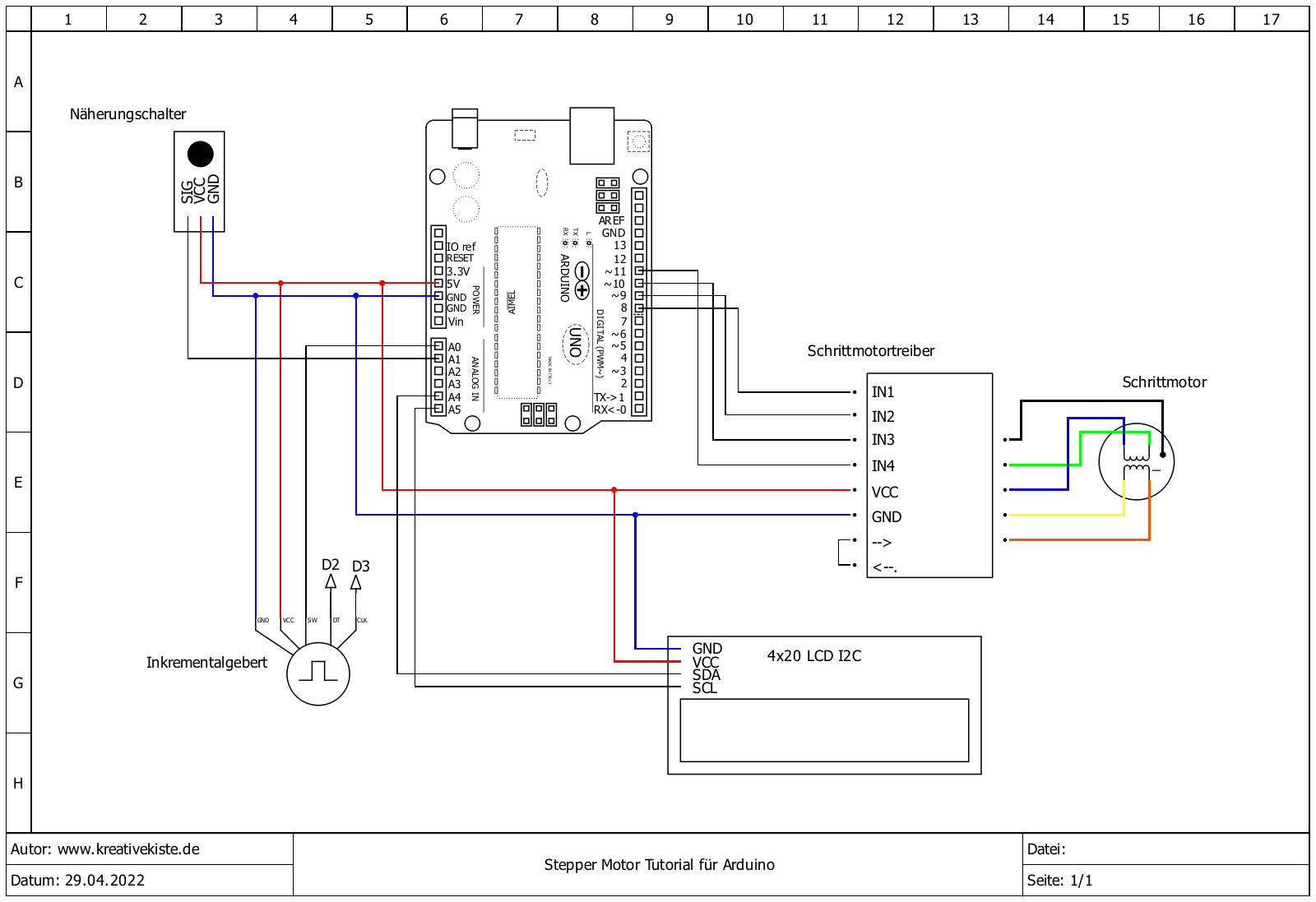
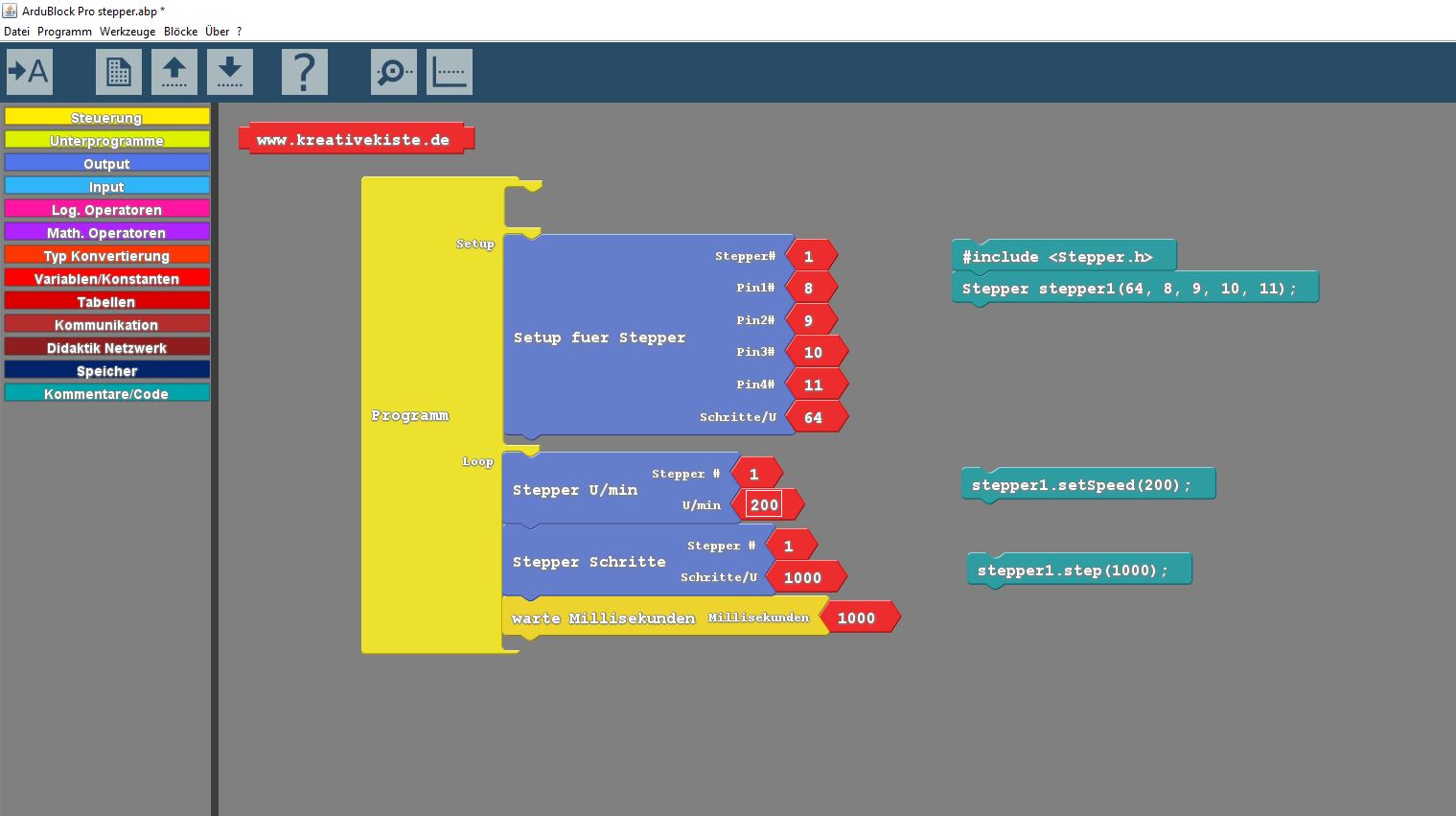
Ich verwende die Ardublock Version LetsgoINK, wer eine andere Version verwendet in der es keine Blöcke für Schrittmotoren gibt, der kann über das einfügen von CODE Blöcken die Motoren ansteuern.
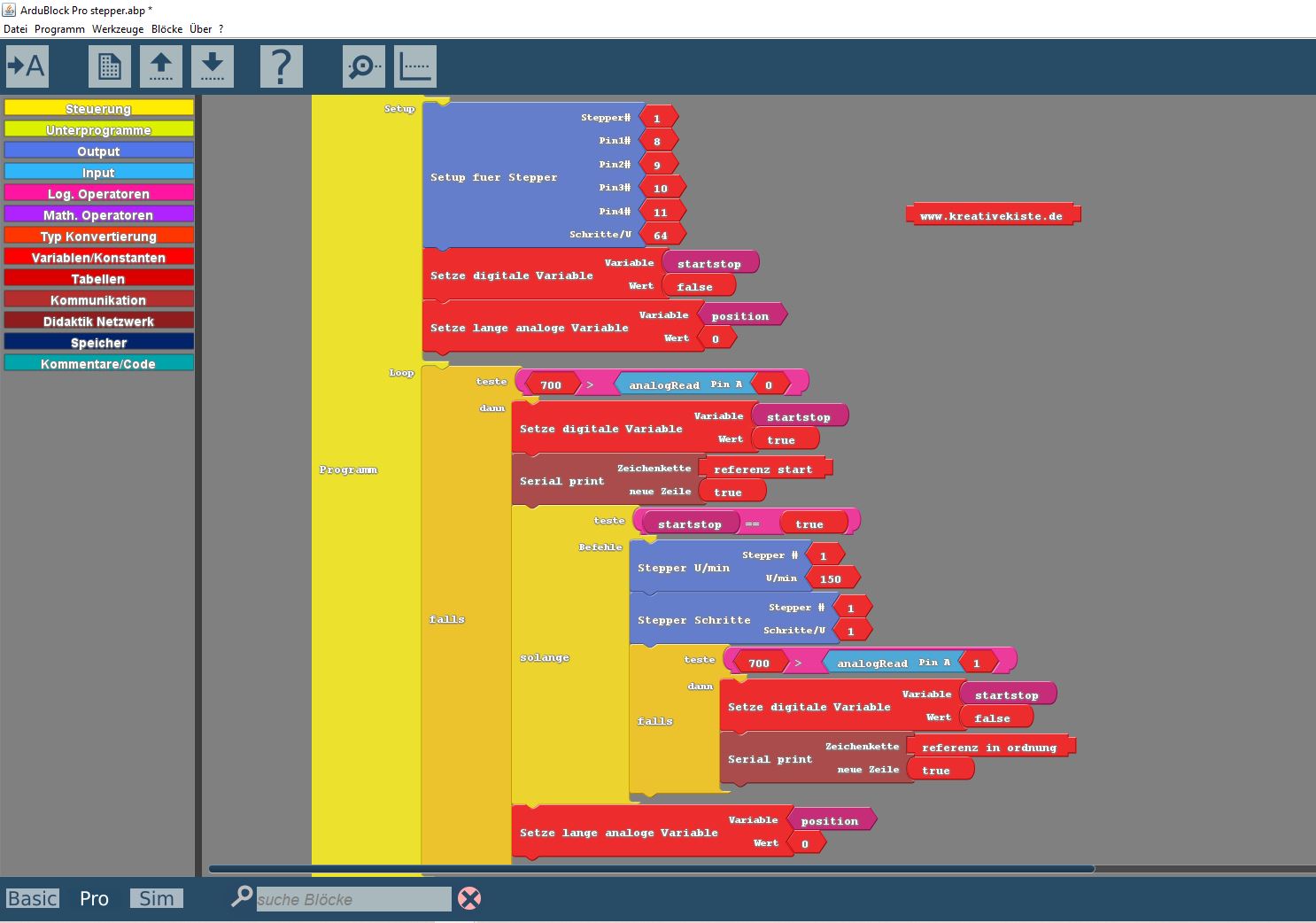
1: Arduino und Schrittmotor Referenzfahrt
Damit der Schrittmotor "weiß, wo er sich gerade befindet" muss zuerst mal eine so genannte Referenzfahrt gemacht werden. Dabei bewegt sich der Schrittmotor so lange in eine Richtung bis er durch einen Schalter, Näherungssensor oder ähnliches gestoppt wird. Nun ist eindeutig klar an welcher Position sich der Schrittmotor befindet, deshalb wird diese auch 0 (Null) Position genannt. Dies ist nun die Ausgangsposition für alle weiteren Schritte die der Motor ansteuern soll.
2: Unterschied zwischen absoluter und relativer Position bei der Schrittmotoren (Stepper Motor) Steuerung
Der Unterschied zwischen einer relative und absoluten Position liegt einfach gesagt nur darin, dass bei der absoluten Position die Position bekannt ist. Ich möchte das mit einer Autofahrt vergleichen.
Stell dir vor du steigst nachts in dein Auto, du warst die ganze Nacht unterwegs und fährst los. Zuerst 1000 Meter, wartest, steigst aus, suchst nach dem Weg. Dann steigst du aus, weißt aber nicht mehr wie weit du gefahren bist und wo du her gekommen bist. Du weist aber du musst wieder 1000 Meter fahren und das machst du immer so weiter. Das ist die relative Position, du bewegst dich immer vorwärts oder rückwärts ohne zu wissen wo du dich befindest.
Stell dir vor du steigst daheim in dein Auto und fährst 1000 Meter bis zu deinem Freund, danach fährst du noch mal 1000 Meter bis zum Einkaufen und danach noch mal 800 Meter bis ins Schwimmband. Du weist nun zum einen dass du 3800 Meter gefahren bis, zudem weißt du genau welche Strecke du gefahren bist. Und weil du das genau weißt, kannst du auch wieder zurück fahren. Das ist die absolute Position, du weißt immer genau wo du dich befindest. Dabei ist dein Zuhause die Stelle an die Stelle der Referenzfahrt.
In einem Bild kann man so ausdrücken. Bei der relativen Position beginnst du immer bei 0 und bewegst dich genau so viele Schritte wie du machen sollst ohne zu wissen wo du dich befindest. Im Gegensatz zur absoluten Position, hier weist du immer genau wo du dich befindest.
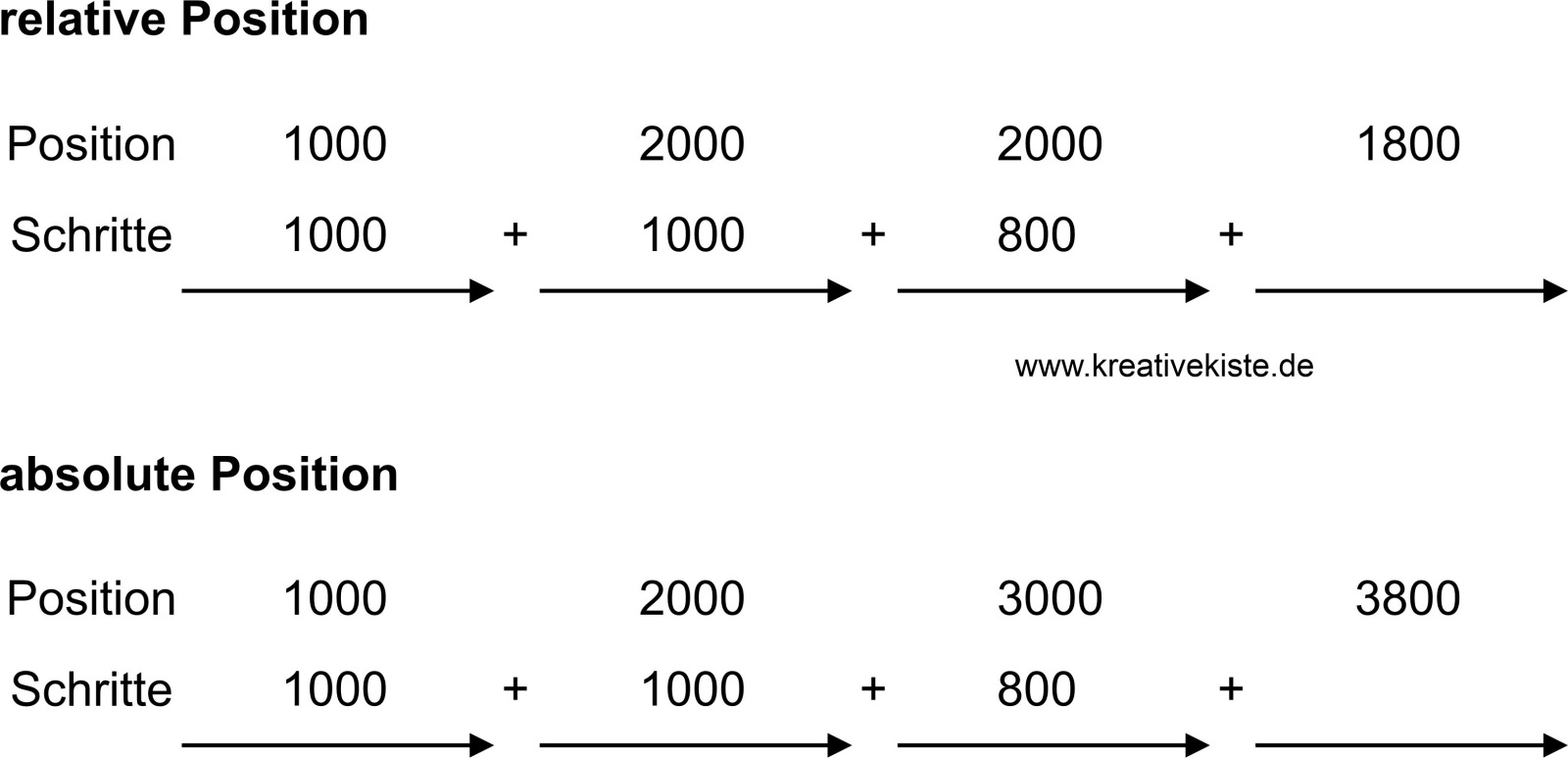
Der unterschied zwischen der absoluten und der relativen Position besteht also darin dass bei der absoluten Position eine referenzfahrt gemacht wird, bei der die "Home" bzw. die Position 0 festgelegt wird.
Die anderen Teile werden folgen noch.

