Ein Glücksrad kennst du bestimmt von Jahrmärkten, feiern beim Sportverein oder Veranstaltungen in der Schule. Ein solches Glücksrad kann mit dem Arduino ganz toll selber nachgebaut werden. Über ein Mikrofonmodul, wird das Glücksrad gestartet und dreht sich dann über einen Zufallsgenerator länger oder kürzer.
Für dieses Projekt benötigst du neben dem Arduino UNO, einem KY-037 Modul noch einen 28BYJ-48 + ULN2003 Schrittmotor mit Treiber. Dieser benötigt nur 5 Volt und hat eine so geringe Stromaufnahme damit er direkt an den Arduino angeschlossen werden kann. Somit musst du nur 4 Kabel für den Motor und zwei Kabel für die Spannungsversorgung mit dem Arduino verbinden.
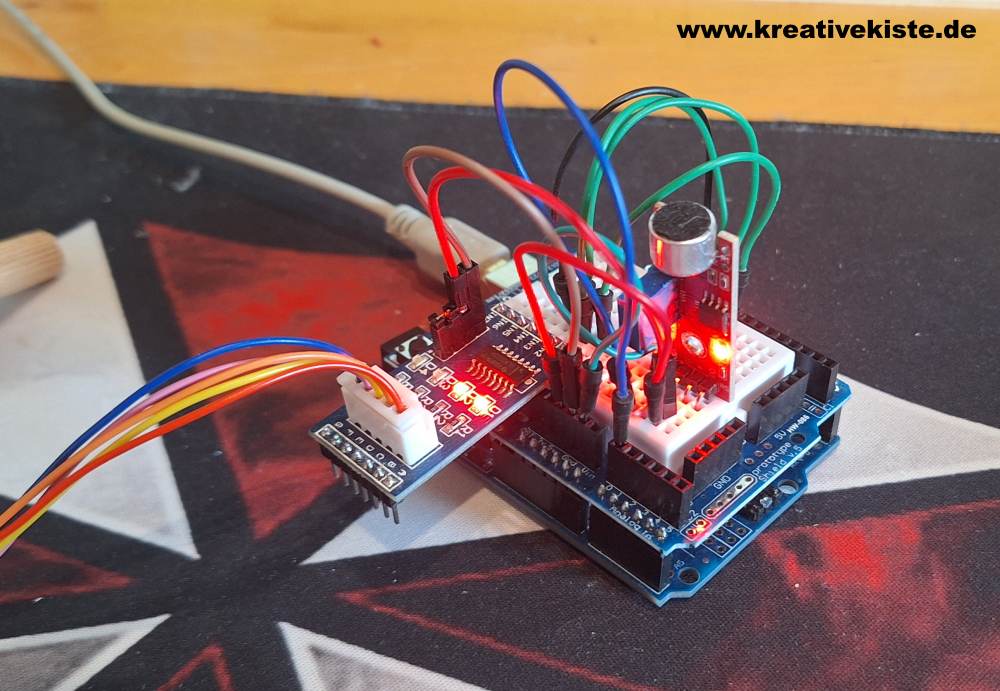
Anschluss Arduino Glücksrad
- Der das KY-037 Mikrofonmodul --> Analog Read 0
- Der Stepper wird mit folgenden PINs mit dem Arduino verbunden
- IN1 - Pin 8
- IN2 - Pin 9
- IN3 - Pin 10
- IN4 - Pin 11
Der Arduino Code für das Spiel
So funktioniert der Code
Der Code ist in drei logische Phasen unterteilt, damit die Bewegung des Rades natürlich und flüssig wirkt:
1. Die Initialisierung (Setup)
Im setup() bereiten wir den Arduino vor. Besonders wichtig ist hier der Befehl randomSeed(). Da Computer eigentlich nicht "würfeln" können, nutzen wir das elektrische Rauschen an einem offenen analogen Pin als Basis. Ohne diesen Befehl würde das Rad nach jedem Neustart exakt dieselben Zahlenfolgen generieren und das wäre bei einem Glücksrad natürlich fatal!
2. Die Beschleunigungsphase
Schrittmotoren können nicht sofort von 0 auf 100 starten, sonst "verschlucken" sie sich (Schrittverlust).
- In einer For-Schleife erhöhen wir den Wert der Variable aktuelleGeschwindigkeit Schritt für Schritt.
- Das Rad läuft langsam an und wird immer schneller, bis es seine Höchstgeschwindigkeit erreicht hat.
3. Der Zufall und das Auslaufen
Das ist das Herzstück des Spiels:
- Die Hauptdrehung: Mit random(3000, 9000) bestimmen wir eine zufällige Anzahl an Schritten, die das Rad mit voller Geschwindigkeit dreht. So weiß niemand, wo es landen wird.
- Die Bremsphase: Damit das Rad nicht abrupt stoppt (was unnatürlich aussähe und den Motor belasten könnte), nutzen wir eine zweite Schleife. Hier wird die Geschwindigkeit schrittweise reduziert, bis das Rad sanft zum Stillstand kommt.
Warum die Pin-Reihenfolge (8, 10, 9, 11) wichtig ist
Vielleicht ist dir aufgefallen, dass die Pins im Code nicht einfach 8, 9, 10, 11 nacheinander stehen. Das liegt an der internen Wicklung des 28BYJ-48 Steppers. Damit die Stepper.h Bibliothek die Spulen in der richtigen Reihenfolge ansteuert, müsst du Pin 2 und 3 beim Initialisieren im Code vertauschen. Nur so dreht sich der Motor kraftvoll und flüssig.
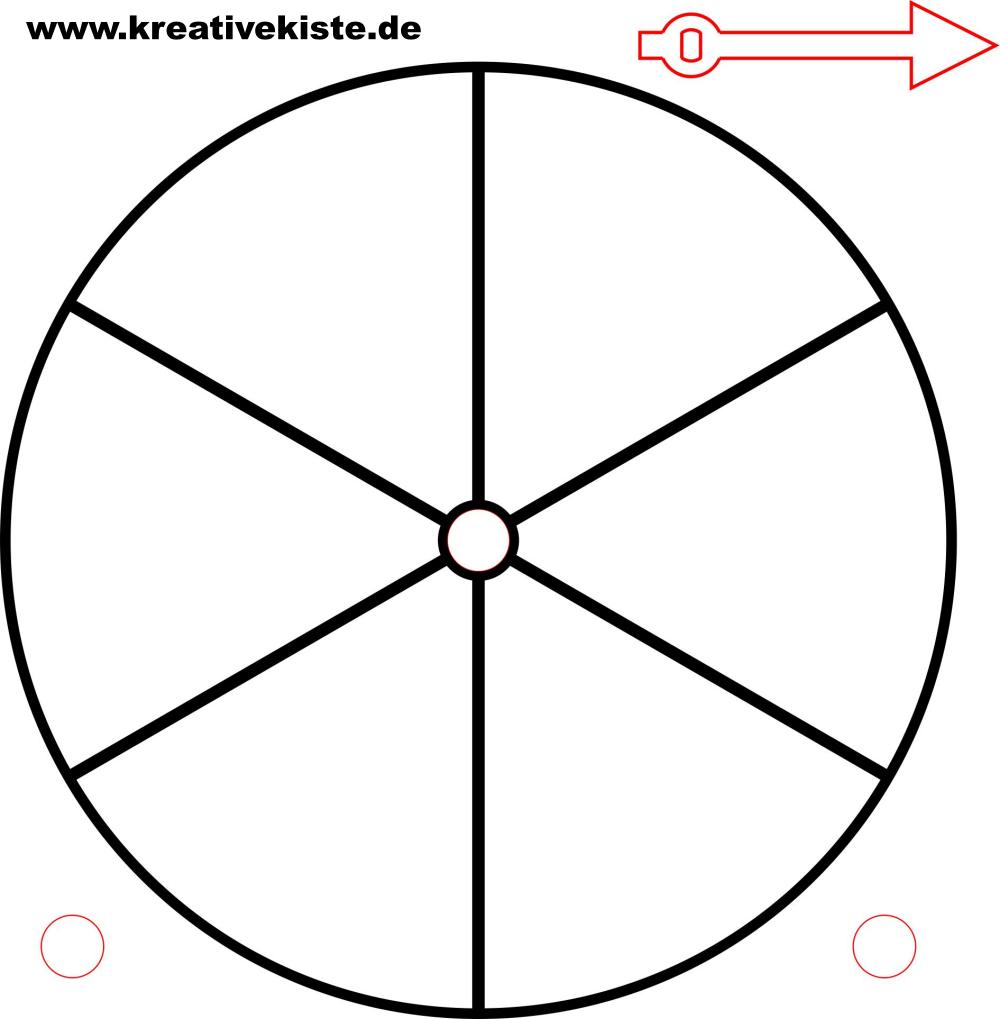
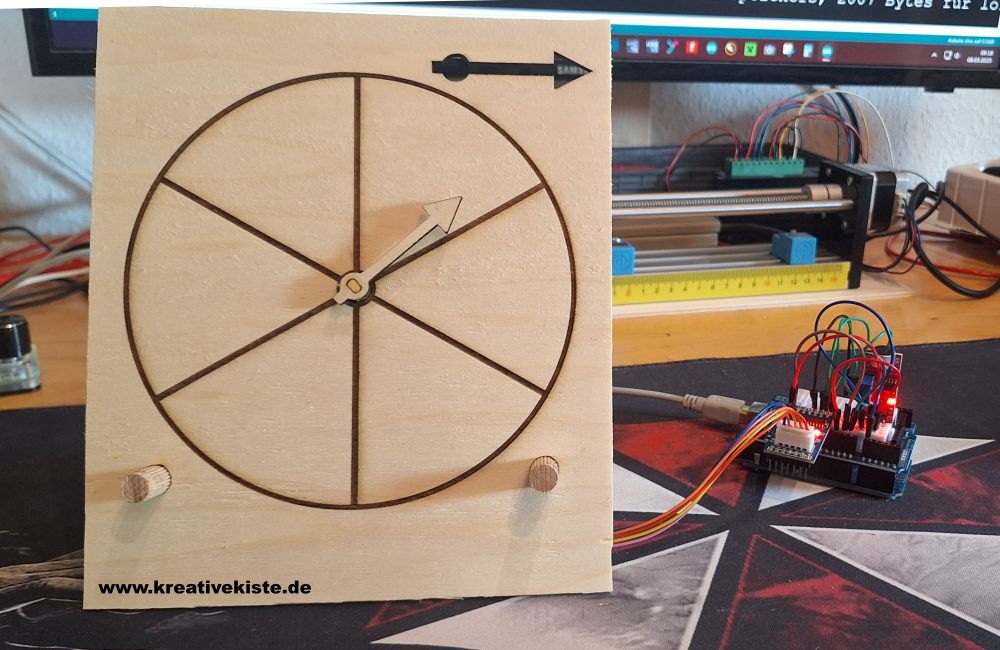
Gestell für das Glücksrad basteln
Ich habe die Grundplatte mit dem Lasercutter gemacht, natürlich geht hier auch eine Pappe oder ähnliches. In der Vorlage ist der Pfeil für die Mitte gleich die Drehrichtung, wer das nicht möchte muss den Pfeil weiter nach oben machen. Zwei 10mm Rundhölzer geben dem Glücksrad Stabilität und eine kleine Schräge.