Encodermotoren sind normale Elektromotoren, die im falle von Fischertechnik für eine Spannung von 9 Volt und eine Stromaufnahme von maximal 0,5 Ampere ausgelegt sind. Das besondere an Encodermotoren ist der zusätzliche Anschluss, eine Buchse für ein 3-poliges Anschlusskabel, über das man mit Hilfe des so genannten Encoders die Drehbewegung des Motors auswerten kann.
Durch das auswerten des Encoder Signals kann man die Strecke die der Motor zurück gelegt hat genau bestimmen. So kann ein Encoder Motor im Gegensatz zu einem Elektromotor ohne Encoder genau 25cm fahren. Damit kann man einen Encoder Motor ähnlich einsetzen wie einen Schittmotor.
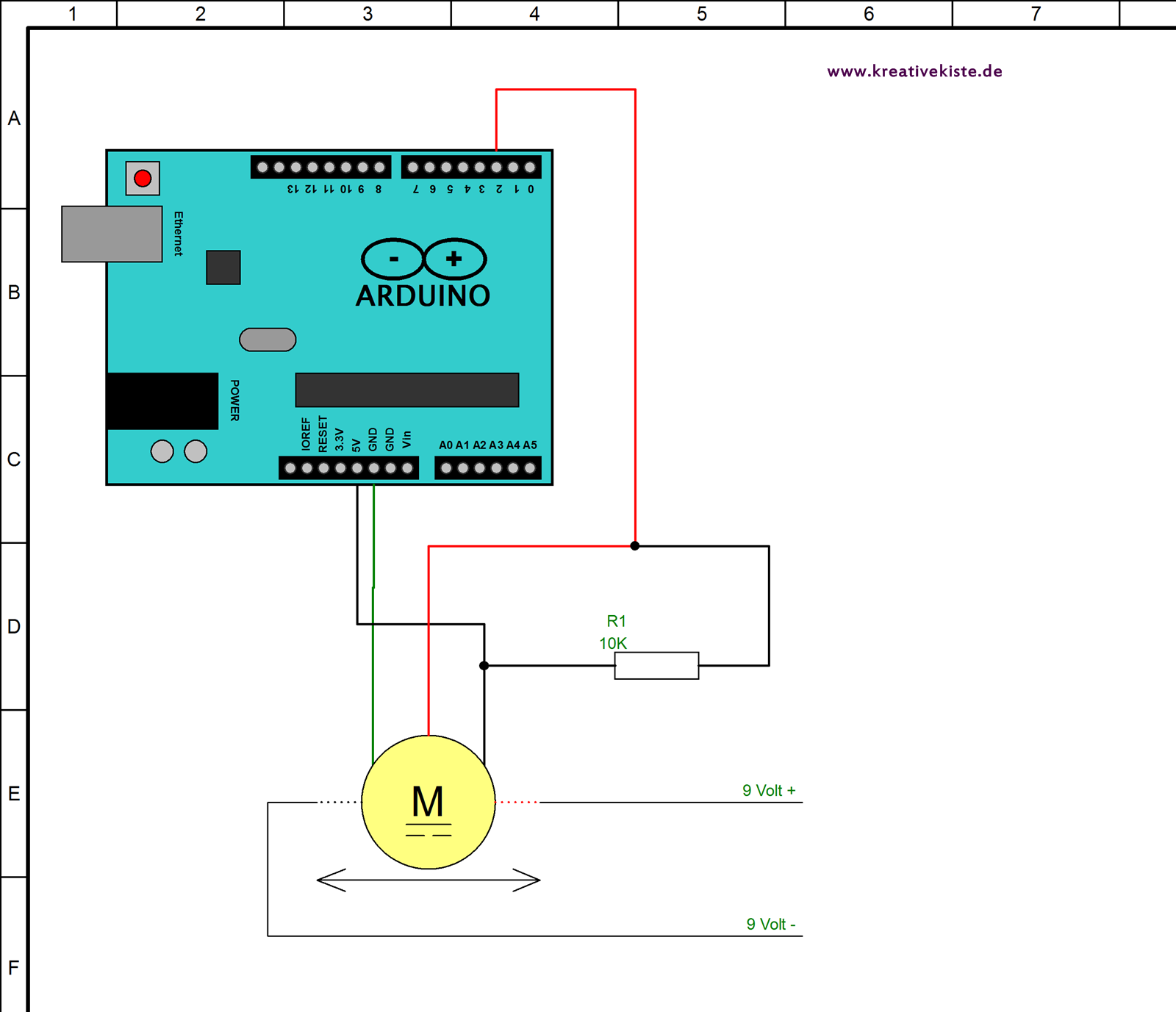
Anschluss des Fischertechnik Motors an den Arduino:
Der Encoder Motor hat einen Anschlusskabel mit drei Farben. Das grüne Kabel wird an GND angeschlossen, ist also der minus Pol. Das schwarze Kabel wird an 5 Volt angeschlossen, ist also der + Pol (VCC). Das rote Kabel ist der Encoder Ausgang und wird an PIN 2 des Arduino angeschlossen, über einen Widerstand wird der Encoder noch malt 5 Volt (VCC) verbunden. Der Fischertechnik Motor selber wird über +/- an 9 Volt angeschlossen.
Auslesen des Encoder mit dem Arduino Board
Der Encoder hat eine Auflösung von: 3 Impulse (6 Impulse wenn 0-1 und 1-0-Flanke gezählt wird) pro Umdrehung des Motors. 63,3/126,6 Impulse pro Umdrehung der Getriebe-Abtriebsachse. Wenn sich der Motor dreht dann wechselt, einfach gesagt, der + und - Pol ständig hin und her. Diesen wechsel der Polarität kann man nun mit der Arduino auslesen. Nach drei mal wechsel ist der Motor eine Umdrehung gefahren. Nun kann man nur den wechsel von + nach - zählen, so kommt man auf 3 wechsel pro Umdrehung. Zählt man alle wechsel, dann kommt auf 6 Wechsel.

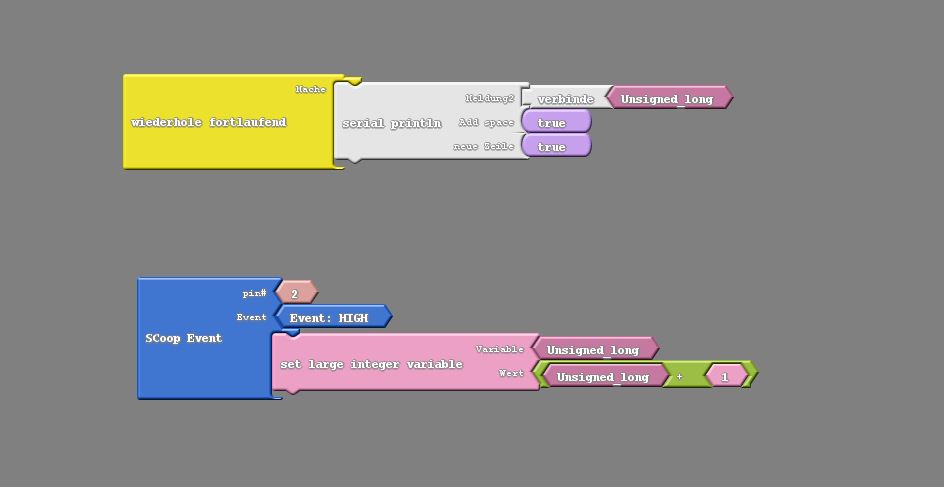
Diesen wechsel am Arduino kann man in Ardublock ganz einfach mit dem "scoop event) Block messen. Entwerter man zählt den wechsel nach + (HIGH) also immer wenn ein "neues" HIGH Signal kommt und speichert dies in einer Variablen. (Dreier Zählung)
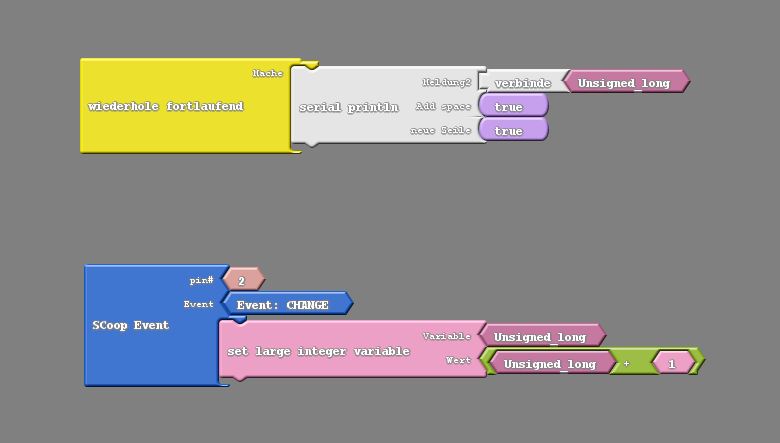
Oder man verwendet den (Event: CHANGE), in diesem Fall wird eben jeder Wechsel gezählt. (Sechser Zählung).
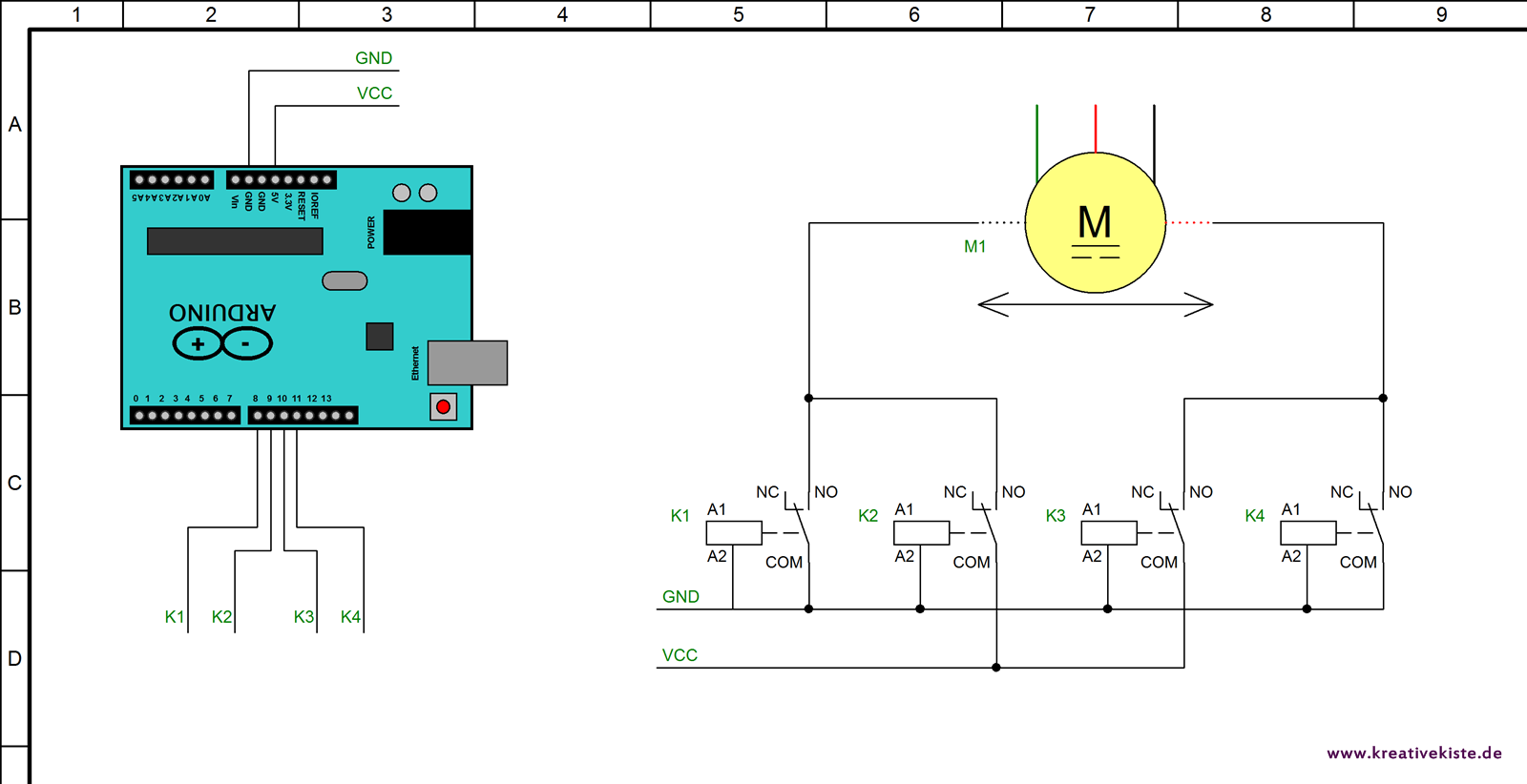
Drehrichtung am Arduino ändern und im Programm zählen
Die Drehrichtung des Encoder Motors kann man durch tauschen von + (VCC) und - (GND) am Motor herbeiführen. Legt man an beide Anschlüsse - (GND) so bremst der Motor und läuft nicht nach. Das ganze kann durch vier Relais wunderbar gelöst werden.
Da die Drehrichtung damit vom Arduino vorgegeben wird. Muss das "+" in der Variablen durch ein "-" ersetze werden und schon kann der Arduino die Vorwärts und Rückwärtsbewegung des Motors zählen.

